
 |
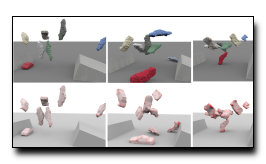
We introduce a new collision proxy for example-based deformable bodies. Specifically, we approximate the deforming geometry as a union of spheres. During pre-computation we perform a sphere packing on the input, undeformed geometry. Then, for each example pose, we move and resize the spheres to approximate the example. During runtime we blend together these positions and radii, using the same skinning weights we use for the geometry. We demonstrate the method on a car crash example, where we achieve an overall speedup of 5--20 times, depending on the resolution of the collision proxy geometry. Ben Jones, Joshua A. Levine, Tamar Shinar, and Adam W. Bargteil
|
|
||
| Full Paper Movie (960x540) |